Update README.md
This commit is contained in:
parent
a97d99d13e
commit
a0fe701264
1 changed files with 4 additions and 4 deletions
|
|
@ -17,22 +17,22 @@ The main firmware architecture including:
|
|||
- FOC Algorithm: *implements the FOC strategy*
|
||||
- Control Type Manager: *Manages the transition between Commutation and FOC Algorithm*
|
||||
|
||||
--> figure FW architecture
|
||||

|
||||
|
||||
The FOC algorithm architecure is illustrated in the figure below:
|
||||
|
||||
--> figure
|
||||

|
||||
|
||||
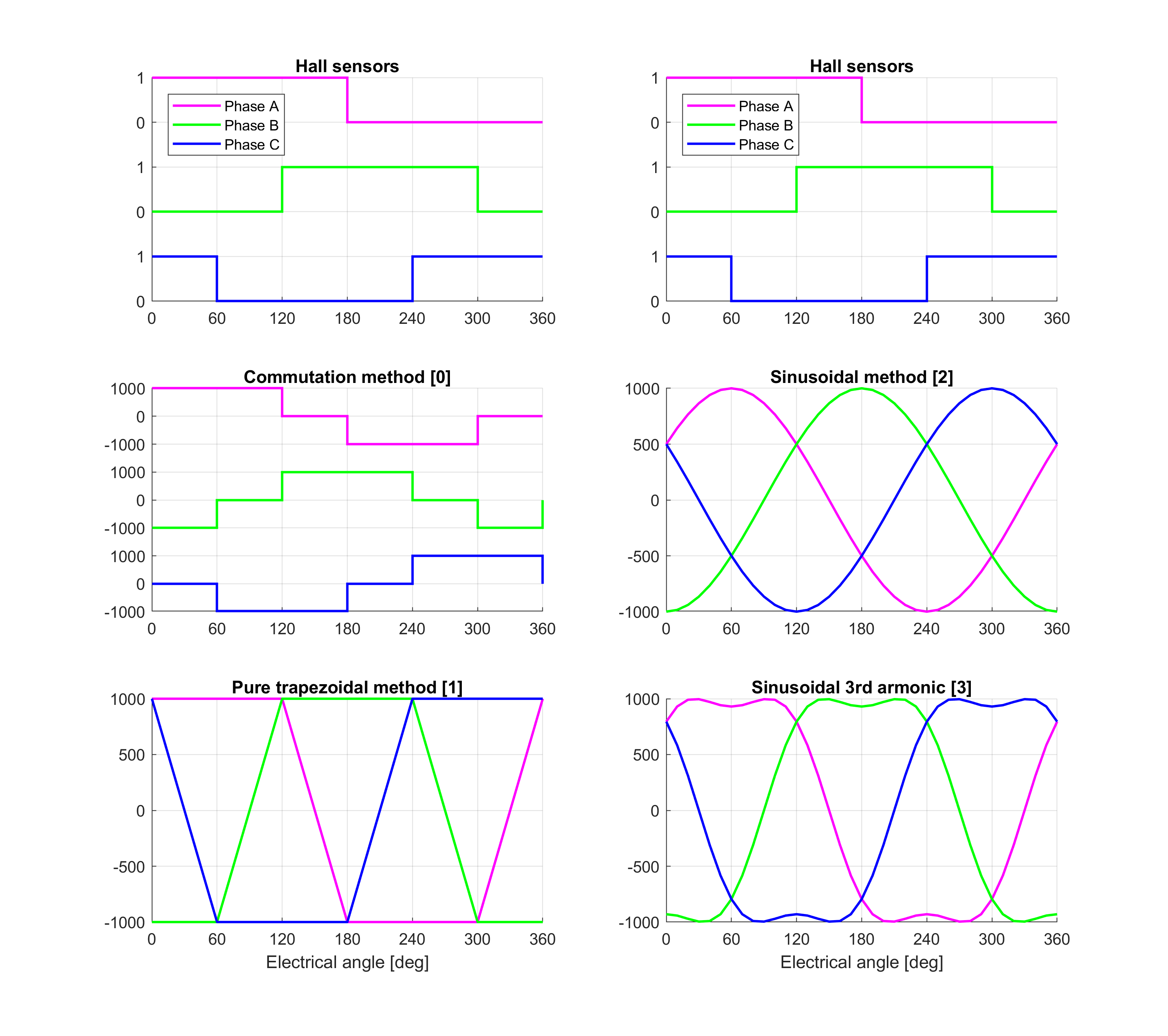
In this firmware 2 control methods are available:
|
||||
- Commutation method
|
||||
- FOC method
|
||||
|
||||

|
||||
|
||||
|
||||
A short video showing the noise performance of the Commutation method vs advanced control method:
|
||||
[►Video: Commutation method vs FOC](https://drive.google.com/file/d/1vC_kEkp2LE2lAaMCJcmK4z2m3jrPUoBD/view)
|
||||
|
||||

|
||||

|
||||
|
||||
|
||||
---
|
||||
|
|
|
|||
Loading…
Add table
Add a link
Reference in a new issue